Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
When I was applying to graduate school and asking for letters of recommendation from my undergrad professors, one of them told me to give academia three years, and that if I hadn’t found a permanent position by then, to find another career. It’s been three years, and next week I start a new job as a data scientist. I read a fair bit of quit lit in my first couple years of grad school and always told myself that if I went that same route, I would never pen any of my own…
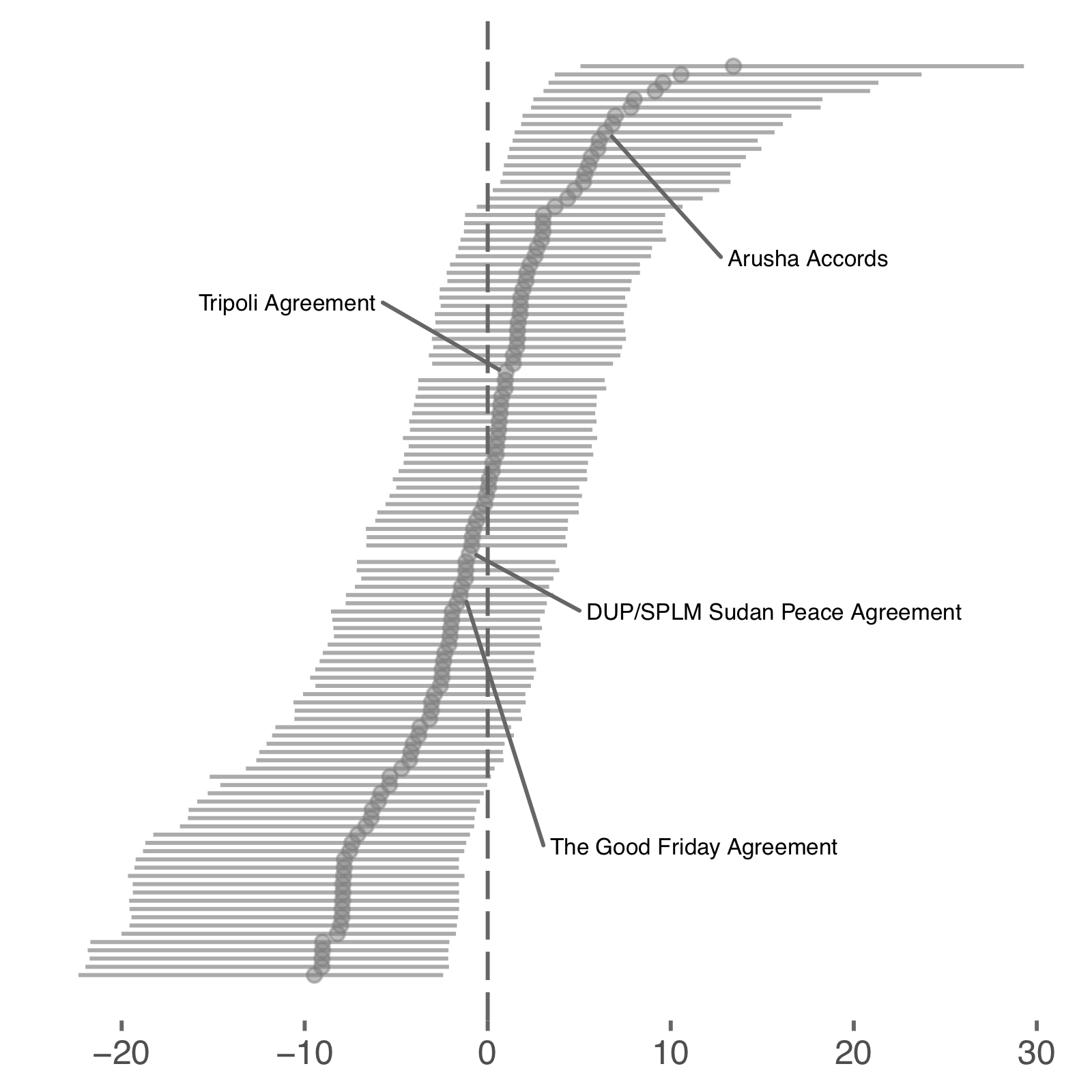
As part of the publication process for my recent article on how states preempt separatist conflict, I needed to submit replication materials to the journal. I took my graduate quantitative methods sequence with the late Tom Carsey, so I’ve long been a proponent replicability efforts in social science. I also had an hourly job in grad school replicating quantitative results for multiple political science journals, so I’m very familiar with best practices for replication. Unfortunately, in the four years since I wrote the first line of code for this project, somewhere in between defending my dissertation and starting a new job (ok, fine, almost immediately after writing that first line of code), I got a little lazy.
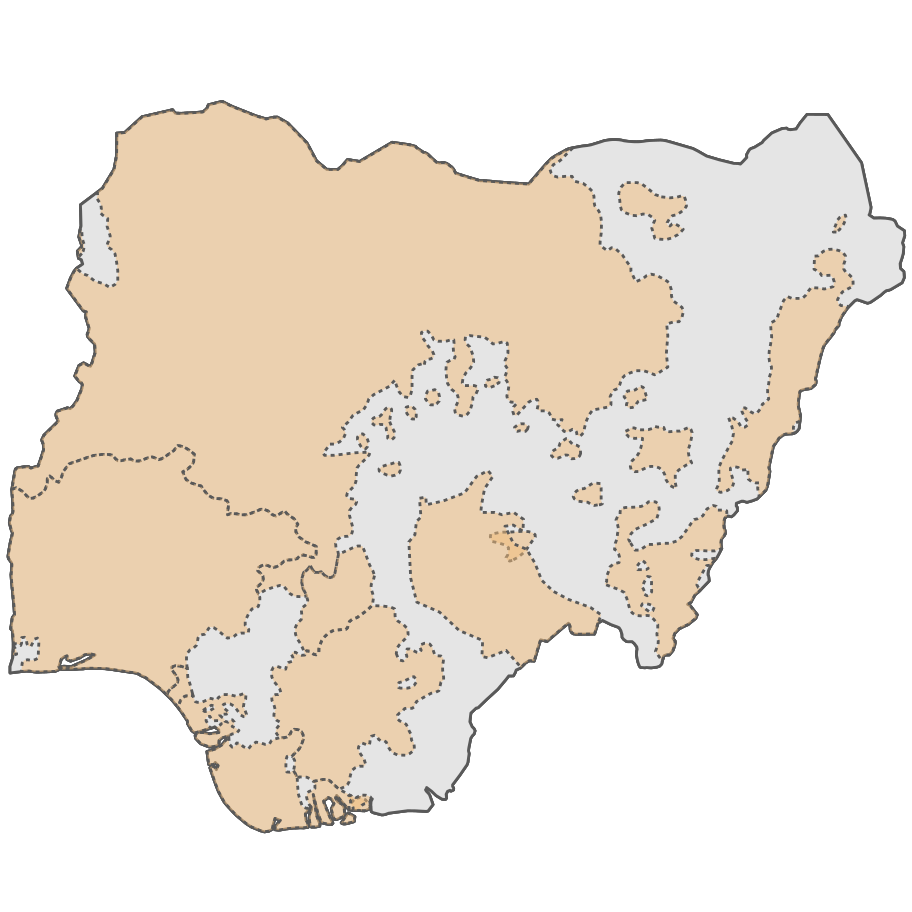
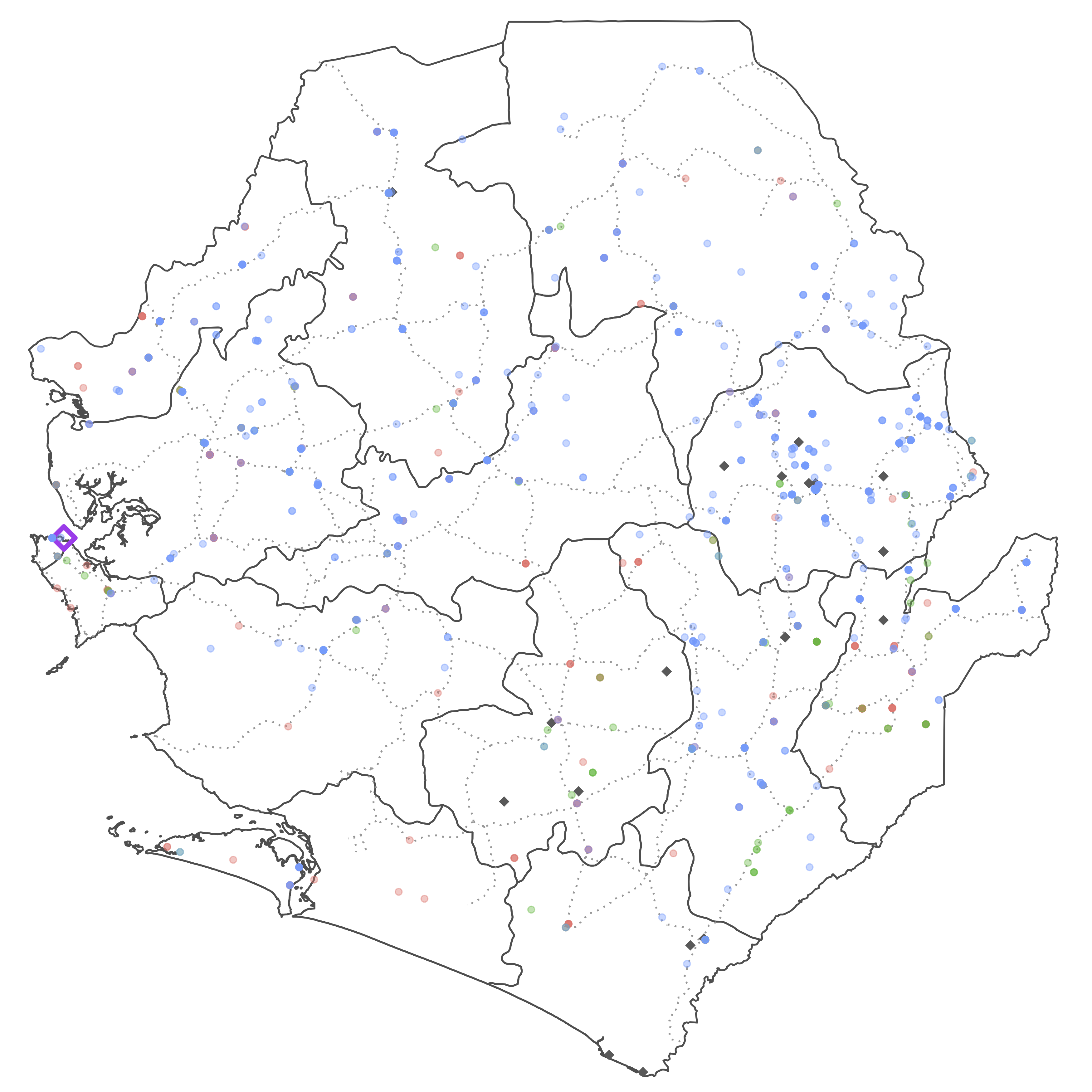
I recently needed to create a choropleth of a few different countries for a project on targeting of UN peacekeepers by non-state armed actors I’m working on. A choropleth is a type of thematic map where data are aggregated up from smaller areas (or discrete points) to larger ones and then visualized using different colors to represent different numeric values.
Like many people, I’ve been spending more time outdoors during this pandemic. While this means daily walks in my neighborhood, it also means getting out into the wilderness and sleeping in a tent when I can. Although outdoor recreation is one of the safer ways to entertain yourself these days, it’s not without its own concerns. The difficulty of safely getting to trailheads means that while I’m backpacking more than usual, it’s still not as often as I’d like.
I use jekyll to create my website. Jekyll converts Markdown files into the HTML that your browser renders into the pages you see. As others and I have written before, it’s pretty easy to use R Markdown to generate pages with R code and output all together. One thing has consistently eluded me, however: footnotes.
In my research I frequently work with large datasets. Sometimes that means datasets that cover the entire globe, and other times it means working with lots of micro-level event data. Usually, my computer is powerful enough to load and manipulate all of the data in R without issue. When my computer’s fallen short of the task at hand, my solution has often been to throw it at a high performance computing cluster. However, I finally ran into a situation where the data proved too large even for that approach.
I’m currently compiling a list of university-affiliated programs designed to help prepare students for graduate study in political science and assist them in the process of applying to graduate school (a labyrinthine and opaque process in many regards). Since travel costs can be a deciding factor for some students when deciding whether to apply to these programs, I thought it would be nice to also put them on a map.
Some coauthors and I recently published a piece in the Monkey Cage on the recent military coup in Mali and the overthrow of president Ibrahim Boubacar Keïta. We examine what the ouster of Keïta means for the future of MINUSMA, the United Nations peacekeeping mission in Mali. One of my contributions that didn’t make the final cut was this plot of casualties to date among UN peacekeepers in the so-called big 5 peacekeeping missions .
One thing I haven’t covered in my previous posts on creating and customizing an academic website is how to actually add content to your site. You know, the stuff that’s the reason why people go to your website in the first place? If you’ve followed those guides, your website should be professional looking and already feeling a little bit different from the stock template. However, adding new pages or tweaking the existing pages can be a little intimidating, and I realized I should probably walk through how to do so. Luckily Jekyll’s use of Markdown makes it really easy to add new content!
This is a followup to my previous post on creating an academic website. If you’ve followed that guide, you should have a website that’s professional-looking and informative, but it’s probably lacking something to really make it feel like your own. There are an infinite number of ways you could customize the academicpages template (many of them far, far beyond my abilities) but I’m going to walk you through the process I used to start tweaking my website. The goal here isn’t to tell you how you should personalize your website, but to give you the tools to learn how to implement whatever changes you want to make.
If you’re an academic, you need a website. Obviously I agree with this since you’re reading this on my website, but if you don’t have one, you should get one. Most universities these days provide a free option, usually powered by WordPress (both WashU and UNC use WordPress for their respective offerings). While these sites are quick to set up and come with the prestige of a .edu URL, they have several drawbacks that have been extensively written on.
Much has been written lately about the increasing militarization of US law enforcement. One of the most visible indicators of this shift in recent decades is the increased frequency of tactical gear and equipment worn and carried by police officers. However, this pales in comparison to images of police departments bringing armored vehicles to peaceful protests.
14 pt periods. 1.05” margins. 2.1 spaced lines. Times Newer Roman. I’ve seen them all, and I’m tired of trying to catch them. So, I’ve stopped assigning papers in terms of page length and switched to word counts. Unfortunately, counting words is more time-intensive than counting pages.
Everyone knows that Beamer makes frankly terrible presentations without a good deal of help. A well crafted Beamer presentation can be a thing of beauty, especially since you can use knitr or R Markdown to automatically generate tables and figures, but it takes a lot of work.
I’m currently cleaning and wrangling a large (> 2 billion observations) dataset. Due to its size, I’m running code in batch mode on a remote cluster. Not running interactively makes it harder for me to check on my code’s progress.
I recently updated my CV to add my ORCiD identifier to it up top among the other places to find me online. An ORCiD is an online identifier that persists through any changes to your name, institution, or email address throughout your life.
My previous post on combining multiple PDF files had an important caveat that things would end up in the wrong order if you had files with leading ID numbers that started at 1 and ended at 12, you’d end up with PDFs combined in the order 1, 10, 11, 12, 2, 3, …, 9.
How many times have you found that your institution has access to a digital version of a book you need only to discover that it comes in 15 different PDF files?
K.M. Han and N. DeSouza G. (2007). Feature detection algorithm for autonomous camera calibration. In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 286-291 DOI: 10.5220/0001631902860291
K.M. Han and G. N. DeSouza, "Instataneous geo-location of multiple targets from monocular airborne video," 2009 IEEE International Geoscience and Remote Sensing Symposium, 2009, pp. IV-1003-IV-1006, doi: 10.1109/IGARSS.2009.5417549.
K.M. Han and G. N. DeSouza, "Multiple targets geolocation using SIFT and stereo vision on airborne video sequences," 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2009, pp. 5327-5332, doi: 10.1109/IROS.2009.5354038.
Han, K.M., Yuanqiang Dong and Guilherme N. DeSouza. “Experimenting with Autonomous Calibration of a Camera Rig on a Vision Sensor Network.” ICINCO (2010).
K. M. Han and H. T. Choi, "Shape context based object recognition and tracking in structured underwater environment," 2011 IEEE International Geoscience and Remote Sensing Symposium, 2011, pp. 617-620, doi: 10.1109/IGARSS.2011.6049204.
Han, K.M., DeSouza, G.N. Geolocation of Multiple Targets from Airborne Video Without Terrain Data. J Intell Robot Syst 62, 159–183 (2011). https://doi.org/10.1007/s10846-010-9442-7
K. M. Han, Y. Lee and H. -T. Choi, "Developing an efficient landmark for autonomous docking tasks of underwater robots," 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), 2012, pp. 357-361, doi: 10.1109/URAI.2012.6463016.
G. Lu, K. M. Han, G. N. DeSouza, J. Armer, and C.-R. Shyu, "A new algorithm for 3D registration and its application in self-monitoring and early detection of lymphedema," Innovative and Research in BioMedical engineering, vol. 35, no. 6, pp. 370-384, Oct. 2014, doi: 10.1016/j.irbm.2014.10.003.
K. M. Han and Y. J. Kim, "Robust RGB-D Camera Tracking using Optimal Key-frame Selection," 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 6275-6281, doi: 10.1109/ICRA40945.2020.9197021.
K. M. Han and Y. J. Kim, "KeySLAM: Robust RGB-D Camera Tracking Using Adaptive VO and Optimal Key-Frame Selection," in IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 6940-6947, Oct. 2020, doi: 10.1109/LRA.2020.3026964.
Han, K.M., Rueda, A.J. Robust and efficient object reconstructions from closed loop sequences. Machine Vision and Applications 32, 70 (2021). https://doi.org/10.1007/s00138-021-01193-7
H. Min, K. M. Han and Y. J. Kim, "Accelerating Probabilistic Volumetric Mapping using Ray-Tracing Graphics Hardware," 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 5440-5445, doi: 10.1109/ICRA48506.2021.9561068.
K. M. Han and Y. J. Kim, "Autoexplorer: Autonomous Exploration of Unknown Environments using Fast Frontier-Region Detection and Parallel Path Planning," 2022 IEEE International Conference on Intelligent Robots and Systems (IROS), 2022
Heajung Min, K. M. Han and Y. J. Kim, "OctoMap-RT: Fast Probabilistic Volumetric Mapping Using Ray-Tracing GPUs," in IEEE Robotics and Automation Letters, vol. 8, no. 9, pp. 5696-5703, Oct. 2023, doi: 10.1109/LRA.2023.3300227.
K. M. Han and Y. J. Kim, "Neuro-Explorer: Efficient and Scalable Exploration Planning via Learned Frontier Regions," 2024 IEEE International Conference on Intelligent Robots and Systems (IROS), 2024
Eujeong Lee K. M. Han and Y. J. Kim, "ScanningBot: Efficient Scan Planning using Panoramic Cameras," 2025 IEEE International Conference on Intelligent Robots and Systems (IROS), 2025